[TOC]
时间同步
两个节点的本地时间而言, 时钟偏移量表示时钟之间的时间差。 同步是指调整一个或者两个时钟,从而使它们的读数匹配
时间同步的基础:1)单向消息交换;2)双向消息交换;3)接受端-接受端同步;
时间同步协议:
- 基于全球时间源的参考广播
- 基于树的轻量级同步
- TPSN传感器网络的时间同步
- 级别探测阶段
- 同步阶段
- 洪泛时间同步协议
- FTSP时间戳
- 多跳同步
- 参考广播同步
- 时间扩散同步协议
定位技术
节点定位是指根据有限的位置己知的节点来确定无线传感器网络中其他节点的位置,在无线传感器网络的节点之间建立起位置关联关系的定位机制
需要定位的节点称为:(锚节点),每个节点通信半径以内的其他节点称为邻居节点
分类:
1. 基于测距(range-Based)的定位(Range-Based)和与距离无关(Range-Free)
2. 基于锚节点的定位算法(Anchor-Based)和无锚节点辅助的定位算法(Anchor-Free)。
3. 集中式计算定位需要把信息传送到某个中心节点(例如服务器),在中心节点完成节点位置的计算
4. 紧密耦合定位与松散耦合定位
定位的基本要素:信号强度,到达时间,到达时间差,到达角度
性能分析:定位精度,规模,锚节点密度,节点密度,覆盖率,容错性和自适应性,功耗,成本;
基于测距的定位算法
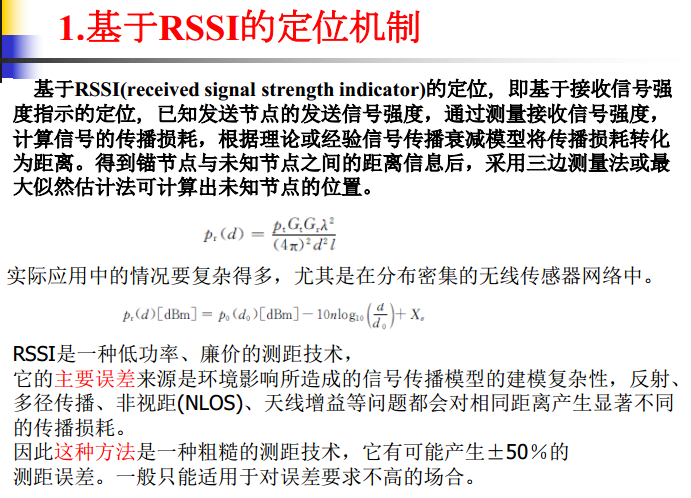
基于测距的定位机制(rang-based)通过测量相邻节点间的距离或角度信息,然后再使用三边测量、三角测量或最大似然估计定位计算方法来计算节点位置
过程:1)测距阶段,2)定位阶段,3)校正阶段
三边测量法:当未知节点到至少三个节点的估计距离己知,则可使用三边测量法(trilateration)。三边测量法以三个节点为中心的圆交点作为未知节点的估计位置
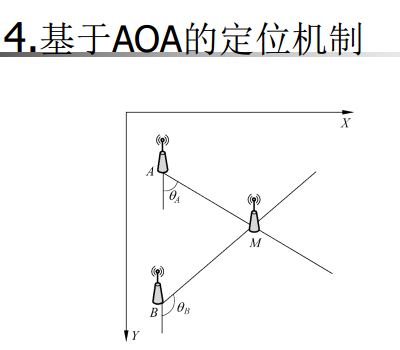
三角测量法:三角测量法(triangulation)根据三角形的几何关系进行位置估算。三角测量法首先进行“点在三角形中”的测试,即任意选取三个锚节点组成三角形,以测试未知节点是否落在该三角形内。根据测试结果,如果在三角形内部,就可以采用如下的方法计算节点的位置
距离无关的定位算法
典型的距离无关的定位算法有质心定位算法、凸规划定位算法、 APS定位算法、Amorphous定位算法、APIT算法、SeRLOC算法等
数据融合
数据融合是利用计算机技术对按时序获得的多传感器观测信息在一定的准则下进行多级别、多方面、多层次信息检测、相关估计和综合,以获得目标的状态和特征估计,产生比单一传感器更精确、完整、可靠的信息、更优越的性能,而这种信息是任何单一传感器所无法获得的
①高了信息的可信度。②扩展系统的空间、时间覆盖能力。③减小系统的信息模糊程度。④改善系统的检测能力⑤提高系统的可靠性⑥提高系统决策正确性
节能
传感器网络存在着能量约束问题,它的一个重要设计目标就是高效使用传感器结点的能量,在完成应用要求任务的前ᨀ下,尽量延长整个网络系统的生存期。
(1)传感器结点采用电池供电,(2)传感器结点中消耗能量的模块,(3)网络协议控制了传感器网络各结点之间的通信机制,决定无线通信模块的工作过程。(4)无线传感器网络的能量管理(Energy Management, EM)主要体现在传感器结点电源管理(Power Management, PM)和有效的节能通信协议设计
设计方法:休眠机制、数据融合等
1. 休眠机制:当节点周围没有感兴趣的事件发生时,计算与通信单元处于空闲状态,把这些组件关掉或调到更低能耗的状态,即休眠状态;1)硬件支持;2)采用休眠机制的网络协议;3)专门的节点功率管理机制,动态电源管理,动态电源调度
2. 数据融合:数据融合的节能效果主要体现在路由协议的实现上。路由过程的中间节点并不是简单的转发所收到的数据,由于同一区域内的节点发送的数据具有很大的冗余性,中间节点需要对这些数据进行数据融合,将经过本地融合处理后的数据路由到汇聚点,只转发有用的信息。数据融合有效地降低了整个网络的数据流量LEACH路由协议就具有这种功能,它是一种自组织的在节点之间随机分布能量负载的分层路由协议
容错技术
失效是指某个设备中止了它完成所要求功能的能力。故障是指一个设备、元件或组件的一种物理状态,在此状态下它们不能按照所要求的方式工作。差错是指一个不正确的步骤、过程或结果。故障只有在某些条件下才能在其输出端产生差错,这些差错由于在系统内部,不是很容易就能观测到。只有这种差错积累到一定程度或者在某种系统环境下,才能使系统失效。所以,失效是面向用户的,而故障和差错是面向制造和维修的
无线传感器网络容错是指网络中某个节点或节点的某些部件发生故障时,网络仍然能够完成指定的任务
无线传感器网络容错设计需要考虑三个方面: 故障模型、故障检测与诊断、修复机制。
故障检测与诊断:目标是检测网络中的异常行为,故障检测分为部分检测和节点检测
- 部件检测
- 基于空间相关性的故障检测:无线传感器网络相邻节点的同类传感器所测量的值通常很相近,称这种特性为空间相关性。一个节点通过周围邻居的同类传感器来检测自己的传感器是否发生了故障。根据故障检测时是否需要节点地理位置信息,可以分为如下两类: ①需要地理位置信息; ②不需要地理位置信息
- 需要地理位置信息的:某节点的传感器测量到的结果与周围节点测量到的结果都不相同时,这个节点的传感部件很可能发生了故障
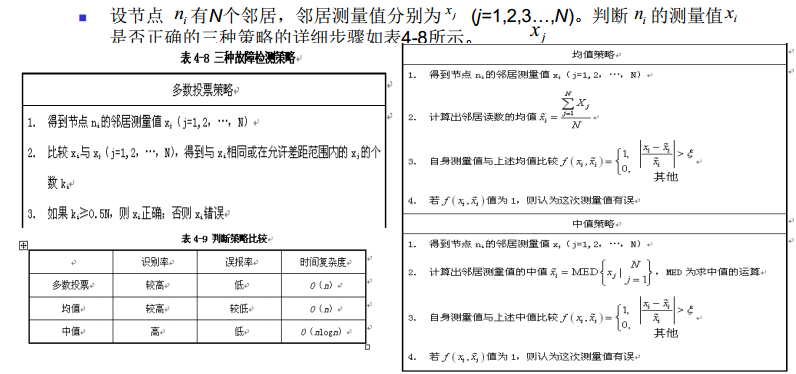
- 不需要地理位置信息的:无线传感器网络中的正常节点都能侦听到邻居发送的消息。节点可以依据侦听到的邻居数据来判断自己测量值是否正确,判断策略可以分为多数投票策略、均值策略和中值策略
- 节点故障检测:根据检查过程是否集中进行,分为集中式和分布式
- 集中式:通过在Sink节点放置检测程序,实时监测网络状态

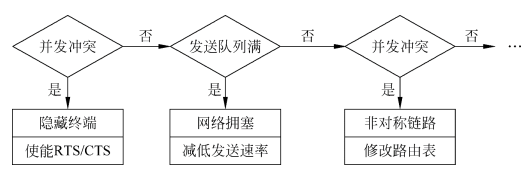
- 分布式:不是由Sink节点统一检测,而是由每个节点分别自行检测。隐藏终端(hidden terminals)、拥塞、链路不对称是几种常见的节点通信故障
- 集中式:通过在Sink节点放置检测程序,实时监测网络状态
- 故障恢复
- 部署K连通拓扑:一种建立容错拓扑的方法是构造k连通图。 k连通网络是指网络中任意两点之间都至少有k条不相交的路径,k连通网络中任意k-1个节点发生故障时网络仍然保持连通
- 非k连通的修复
- 以上都是基于连通的修复,以下是基于覆盖的修复
- 假设网络中的节点具有移动能力,它把覆盖修复过程分为四个阶段:(1)初始化阶段:节点计算自己的覆盖区域、每个覆盖区域对应的移动区域;(2)恐慌请求阶段:垂死节点广播求助消息;(3)恐慌回应阶段:垂死节点的邻居收到求助消息后计算如果自己移动到垂死节点的移动区域,是否会影响到自身的覆盖区域,如果不影响则给求助节点返回消息;(4)决策阶段:垂死节点根据收到的回应信息,决定让哪个节点移动
安全性
传感器网络攻击分为以下几类
①外部攻击与内部攻击:
②被动攻击与主动攻击:
③传感器类攻击与微型计算机类攻击
物理层攻击:人为干扰,物理篡改;
数据链路层攻击:1)碰撞;2)能量消耗;3)不公平性
网络层攻击:1)对路由信息的哄骗、篡改、重放;2)选择性转发3)污水池攻击(sinkhole)4)女巫攻击(Sybil)5)虫洞攻击6)hello泛洪攻击7)确认哄骗
WSN协议技术标准
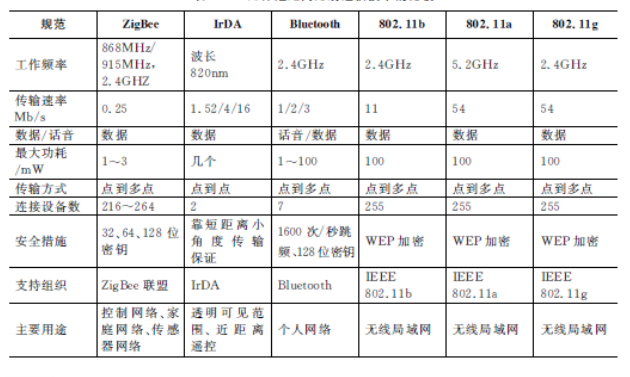
目前国际上已有的标准主要是ZigBee 、802.15.4、超宽带 (Ultra Wideband,UWB)
- zigbee特点:基本特点(1) 功耗:(2) 成本低,(3) 时延短,(4) 网络容量大,(5) 可靠,(6) 安全;;;协议栈原理:在 ZigBee 网络中存在三种逻辑设备类型: Coordinator(协调器), Router(路由器)和End-Device(终端设备)。 ZigBee 网络由一个Coordinator 以及多个Router 和多个End_Device组成;
-
蓝牙:蓝牙运行在2.4GHz的非授权ISM ((Industrial Scientific Medical) )频段, 通信距离只有10m左右。 蓝牙技术具有不同的通信方式, 如点对点的通信方式、 点对多点的通信方式和较复杂的散射网方式
-
wifi:(1)无线电波的覆盖范围广。 WIFI覆盖范围半径可达到100m左右,可以在普通大楼中使用。(2) WIFI传输速度快,可以达到11Mb/s,但是传输的无线通信质量和传输的安全性能不是很好。(3)厂商进入该领域的门槛较低。厂商只要在机场、车站、咖啡店等公共场所设置“热点”,并通过高速线路将因特网接入上述场所。(4)无需布线。 WIFI最主要的优势在于无需布线,可以不受布线条件的限制,因此非常适合移动办公用户的需要
物联网
物联网(The Internet of things)是新一代信息技术的重要组成部分。它是通过射频识别(RFID)、红外感应器、全球定位系统、激光扫᧿器等信息传感设备,按约定的协议,把任何物体与互联网相连接,进行信息交换和通信,以实现对物体的智能化识别、定位、跟踪、监控和管理的一种网络
物联网是一个未来发展的愿景,等同于“未来的互联网” 或“泛在网络” ,能够实现人在任何时间、地点,使用任何网络与任何人与物的信息交换以及物与物之间的信息交换的网络。
物联网可分为三层:感知层、网络层和应用层。
发表回复